Allows machines to see, think, and act in the real world
Large Language Models (LLMs) process text, generate complex code, and perform advanced reasoning. But they are largely disembodied, existing only behind screens and within data centers. They can’t see or touch things in the real world.
This is where Physical AI comes in. It allows machines to see, think, and act in the real world as things happen by combining language models with robots, vehicles, and sensors.
In this article, we will walk you through how physical AI bridges the gap between digital intelligence and physical action.
Here is what we will cover:
- What is Physical AI?
- The Technology Stack Behind Physical AI
- Real-World Use Cases in Industry
- Key Capabilities enabled by Physical AI
- Technical Challenges in development
- Industry Trends and the Future Outlook
What is Physical AI?
Physical AI combines artificial intelligence with robotics hardware, environmental sensors, and edge computing. These systems are designed to sense their surroundings, decide on the best action, and carry it out.
The key feature of physical AI is the use of Vision-Language-Action (VLA) models, which connect what the robot sees and understands to its direct control of movement.
A VLA model lets a robot interpret a high-level command like pick up the mug and autonomously calculate the necessary joint velocities and gripper poses to execute the task.
This allows robots to handle objects they’ve never seen before and perform tasks in new situations (zero-shot generalization) that were otherwise impossible in traditional industrial robots.

The Technology Stack Behind Physical AI
Physical AI consists of four interconnected layers: perception, cognition, action, and edge-to-cloud infrastructure.
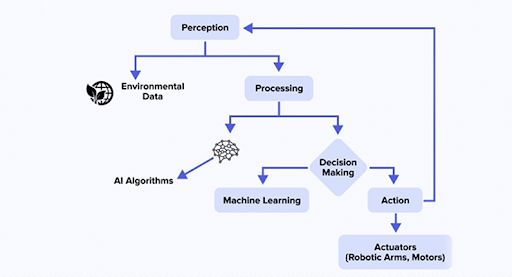
Let’s examine each of them in detail.
Perception Layer
The perception layer allow robot’s sensory system to gather and interpret data from its surroundings in real time. It involves a suite of high-fidelity inputs that provide a three-dimensional understanding of the environment.
- Advanced Sensors: Modern Physical AI systems use a combination of RGB cameras for visual detail, LiDAR (Light Detection and Ranging) for 3D mapping, and IMUs (Inertial Measurement Units) for orientation and motion tracking. In specialized manufacturing contexts, tactile sensors provide haptic feedback that lets the robot sense an object’s fragility or the force required for insertion.
- Computer Vision and Multimodal Models: Computer vision algorithms and multimodal models perform sensor fusion, combining disparate data streams into a unified environmental representation.
- Real-Time Environment Understanding: The perception layer targets semantic understanding, identifying an object’s function and relationships beyond mere geometry. For instance, a warehouse robot can distinguish static shelves from moving humans and predict paths to prevent collisions.
Cognition Layer (Generative Models)
In the cognition layer, generative models are used to perform high-level reasoning, long-horizon planning, and interaction.
- LLMs for Reasoning and Planning: Language models break down abstract goals into atomic tasks. For a command like “pack the lunch box,” the LLM determines specific steps: finding the container, selecting items, and organizing them spatially.
- Multimodal Foundation Models: These models, such as Google’s RT-2, are pre-trained on internet-scale vision and language data. They inherit a broad semantic understanding of the world, which allows them to respond to creative or non-standard instructions.
- Action Tokenization: Models like RT-2 treat motor commands (such as “move_left_50mm”) as just another part of the model’s vocabulary, allowing the robot to leverage the same transformer architecture used for natural language processing (NLP).
Action Layer
The action layer translates cognitive decisions into physical force. This layer includes the mechanical components and the control software that manages them.
- Robotics Systems: This includes a wide variety of “embodiments,” such as stationary manipulators for assembly, Autonomous Mobile Robots (AMRs) for logistics, and drones for aerial surveillance. Each embodiment requires specialized control policies to manage its unique degrees of freedom.
- Motion Planning and Control: High-level plans from the cognition layer are converted into smooth, continuous trajectories for the robot’s actuators. Modern systems often use action chunking, in which the model predicts a sequence of future actions rather than just the immediate next move, and lead to more fluid and human-like motion.
- Correction and Feedback Loops: The action layer operates in a closed loop. The system constantly monitors the results of its movements via sensors and makes micro-adjustments to ensure accuracy and safety. If a robot feels an unexpected resistance while trying to place a part, the feedback loop can trigger a re-planning phase to avoid damage.
Edge and Cloud Layer
The infrastructure layer manages the distribution of computation between local hardware and centralized servers, balancing processing power with the need for speed.
- The Necessity of Edge Computing: For robots operating in dynamic environments, latency is the primary constraint. Sending raw sensor data to the cloud for processing can introduce delays of 50 to 200 milliseconds, which is unacceptable for safety-critical tasks like collision avoidance. Edge computing allows processing to occur directly on the robot or at a local gateway, reducing latency to 1–10 milliseconds.
- Cloud for Scale and Training: While the edge handles “inference” (real-time execution), the cloud is used for “training” and large-scale orchestration. Massive datasets from an entire fleet of robots are aggregated in the cloud to fine-tune foundation models, which are then deployed back to the edge nodes.
- Hybrid Architecture: Most industrial deployments utilize a hybrid model. The edge manages time-sensitive tasks, real-time monitoring, and safety systems, while the cloud provides long-term data storage, big-picture analytics, and cross-site optimization.
Real-World Use Cases
Physical AI is currently moving from the experimental stage into high-scale industrial production, delivering quantifiable improvements in efficiency, safety, and deployment speed.
Manufacturing
In the manufacturing sector, physical AI is solving the un-automatable tasks that were previously too complex for rigid, rule-based systems.
- Adaptive Behavior in Robotic Arms: Modern robotic arms use physical AI to handle high-variability tasks. For example, at Foxconn, AI models are used to simulate and automate precise assembly tasks like cable insertion and screw tightening. These tasks are difficult for traditional robots because they require a sense of touch and the ability to adjust to slight misalignments in parts.
- Predictive Maintenance: Manufacturers are deploying quadruped robots, such as robot dogs, to patrol factory floors. These robots process acoustic signatures and thermal data to detect equipment failures before they occur, potentially saving millions in avoided downtime.
- Reinforcement Learning for Optimization: AI agents monitor shop floor data to reallocate jobs and optimize task priorities. If a machine goes offline, the system instantly recalculates schedules and shifts workflows to ensure urgent orders are still met.
Logistics and Warehousing
The logistics industry is a primary driver of Physical AI adoption, largely due to the intense labor shortages and the need for high-speed order fulfillment.
- Autonomous Mobile Robots (AMRs): Unlike traditional AGVs that require fixed markers, AMRs use SLAM to navigate unpredictable warehouse environments. Amazon has deployed over one million robots across its 300 fulfillment centers, using them to transport heavy shelving units directly to human pickers, which eliminates miles of walking for staff.

- Smart Picking and Sorting: AI-powered robotic arms equipped with VLAs can pick diverse items out of bins without prior training on those specific objects. These systems recognize the geometry of an item and determine the best grasp point, improving picking success rates in complex assembly and e-commerce tasks.

- Inventory Tracking with AI: Drones and ground robots autonomously conduct field surveys, and inventory counts multiple times per day. This provides real-time visibility into stock levels and helps identify misplaced items, a process that used to take days of manual labor.

- Dynamic Path Planning: Logistics providers like Maersk use generative AI for dynamic route optimization, accounting for traffic, weather, and facility disruptions in real-time. This has resulted in a 10–15% reduction in fuel use and delivery times.
Field Operations
Physical AI is extending the reach of automation into challenging, outdoor, and remote environments where human presence is often hazardous.
- Drones for Infrastructure Inspection: In the energy sector, AI-powered drones autonomously navigate inspection sites to monitor power grids, solar panels, and wind turbines. These drones use AI to detect micro-cracks in solar panels or lightning damage on turbine blades, reducing the need for technicians to perform dangerous high-altitude climbs.

- Autonomous Vehicles in Mining and Construction: Companies like Rio Tinto use fleets of self-driving trucks in remote mines to transport materials 24/7. In construction, AI-enabled drones are used for autonomous facade inspections and roof assessments, identifying structural defects like corrosion or water damage with 4K resolution and LiDAR.

- Precision Agriculture: Drones equipped with multispectral sensors and AI are used for smart farming. These systems scan entire fields to detect crop stress or nutrient deficiencies at the plant-by-plant level, enabling targeted application of fertilizer or water. Adoption of these tools can boost crop yields by approximately 20% while reducing chemical waste.

- Public Sector and Emergency Response: Robot dogs are being used for trash collection in difficult terrain, such as Mount Tai in China, while drones are leveraged for fire prevention and navigating the aftermath of earthquakes to find survivors.
Key Capabilities Enabled by Physical AI
The integration of generative models with physical hardware provides robots with intelligent capabilities that were previously unattainable.
- Autonomous Navigation and SLAM: Physical AI systems use Simultaneous Localization and Mapping to build maps of unknown environments while tracking their own position within those maps. This allows robots to navigate through cluttered warehouses or dynamic factory floors without a pre-defined path.
- General-Purpose Object Manipulation: Through VLA models, robots are acquiring the ability to handle a vast array of objects. A single model can be trained to pick up everything from rigid blocks to delicate laundry or transparent plastic bottles, identifying the correct grasp strategy solely from visual input.
- Real-Time Decision-Making: Physical AI systems can reason about their surroundings to make split-second decisions. For example, if a delivery drone encounters a sudden change in wind conditions, it can autonomously adjust its flight path to maintain stability.
- Adaptive Learning in Dynamic Environments: These systems use reinforcement learning to improve their behavior over time through trial and error. This allows them to adapt to new scenarios, such as moving across different floor textures or handling items of varying weights, without being explicitly programmed for every variation.
- Simulation-to-Real Feedback Loops: Robots are trained in high-fidelity simulations where they can complete thousands of hours of experience in a matter of seconds. When deployed in the real world, the data from their actual performance is fed back into the simulation to further refine the models, creating a cycle of continuous improvement.
Technical Challenges in Physical AI
While the potential of physical AI is immense, several challenges currently limit its deployment at scale.
- Latency and Real-Time Constraints: Robots cannot wait for cloud processing to catch a falling object. Cloud dependency issues drive a strong need for local edge inference to guarantee immediate reaction times.
- Sim-to-Real Gap: Models perfectly trained in computer simulation often fail in real environments. This is due to unpredictable variability in lighting, object placement, and physical layouts.
- Safety and Reliability: Unlike a software bug, a robotic failure carries physical risks of injury or property damage. Systems require strict deterministic fallbacks to stop the machine if the AI gets confused.
- Data Challenges: There is a severe lack of high-quality real-world datasets for physical tasks, and manual data collection is incredibly expensive and slow.
- Generalization Problem: Even advanced robots still struggle with unseen scenarios or objects outside their core training data.
Industry Trends and Future Outlook
The field of Physical AI is rapidly evolving toward a future where robots are as versatile and ubiquitous as computers are today.
- The Rise of Robotics Foundation Models: Major tech players are racing to build the GPT of robotics. NVIDIA’s Project GR00T and Physical Intelligence’s pi are early examples of models designed to be cross-embodiment.
- Convergence of LLMs, Robotics, and Edge AI: Language models are being integrated directly with motor control, and all of this is being moved onto specialized edge chips like the Jetson AGX Thor, which delivers 800 teraflops of AI performance for humanoid robots.
- Fully Autonomous Production Systems: We are moving toward “prompt-to-product” manufacturing. A human could theoretically describe a complex product, and a distributed AI system would autonomously generate 3D blueprints, coordinate drone-based logistics, and execute the robotic assembly without human intervention.
- Hyper-Personalization at Scale: Physical AI enables “mass customization,” where production lines can switch from one custom product to another without downtime for reprogramming, as robots use vision and reasoning to handle variations.
Conclusion
Physical AI brings digital reasoning to real-world action. Industries are moving past rigid, rule-based machines into an age of adaptive, embodied intelligence by merging generative AI with advanced robotics. While challenges around latency, data, and safety remain, the rapid convergence of foundation models and edge computing proves that generative AI is fully ready to act, build, and navigate the physical world.
Physical AI: When Robots Meet Generative Models in Manufacturing, Logistics, and Field Operations was originally published in Towards AI on Medium, where people are continuing the conversation by highlighting and responding to this story.